Gallery of examples¶
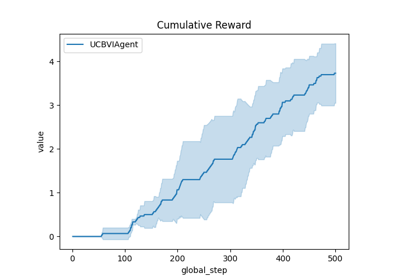
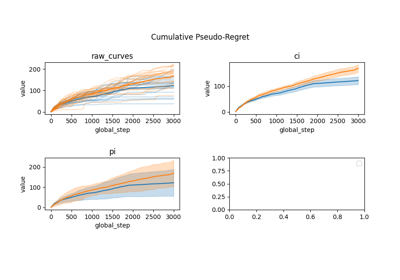
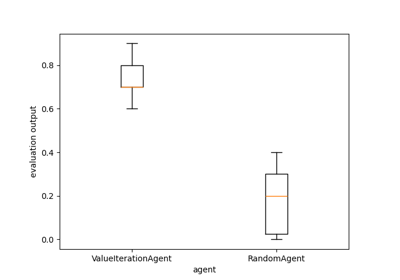
Illustration of rlberry environments¶


A demo of Gridworld environment with ValueIterationAgent
A demo of Gridworld environment with ValueIterationAgent

A demo of OldGymCompatibilityWrapper with old_Acrobot environment
A demo of OldGymCompatibilityWrapper with old_Acrobot environment
A demo of SpringCartPole environment with DQNAgent
A demo of SpringCartPole environment with DQNAgent
A demo of ATARI Atlantis environment with vectorized PPOAgent
A demo of ATARI Atlantis environment with vectorized PPOAgent

A demo of ATARI Breakout environment with vectorized PPOAgent
A demo of ATARI Breakout environment with vectorized PPOAgent
Illustration of rlberry agents¶

A demo of ValueIteration algorithm in Chain environment
A demo of ValueIteration algorithm in Chain environment
A demo of RSUCBVI algorithm in MountainCar environment
A demo of RSUCBVI algorithm in MountainCar environment
A demo of MBQVI algorithm in Gridworld environment
A demo of MBQVI algorithm in Gridworld environment

A demo of RSKernelUCBVIAgent algorithm in Acrobot environment
A demo of RSKernelUCBVIAgent algorithm in Acrobot environment
Illustration of bandits in rlberry¶
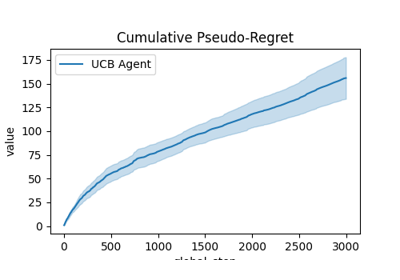
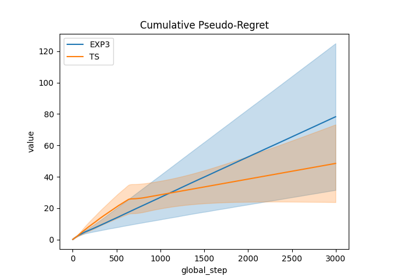
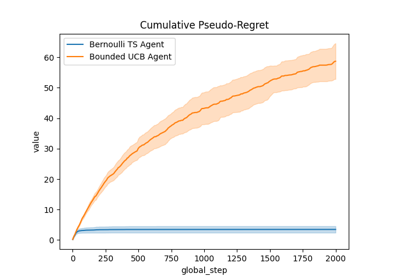
Comparison of Thompson sampling and UCB on Bernoulli and Gaussian bandits
Comparison of Thompson sampling and UCB on Bernoulli and Gaussian bandits
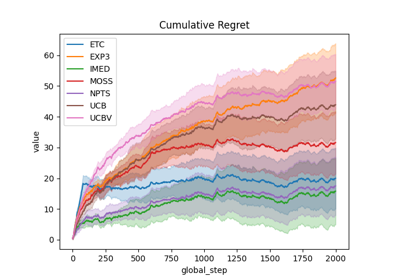
Comparison subplots of various index based bandits algorithms
Comparison subplots of various index based bandits algorithms
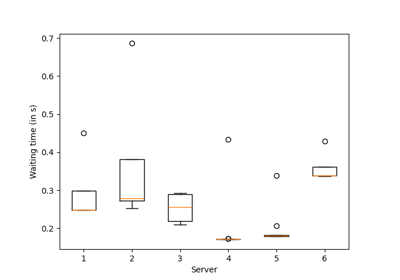
A demo of Bandit BAI on a real dataset to select mirrors
A demo of Bandit BAI on a real dataset to select mirrors